9DoF IMU (Motion & Orientation Sensor)

A sensor that combines accelerometer, gyroscope, and magnetometer in one package. It is suitable for motion sensing, orientation detection, and many more applications.
Background
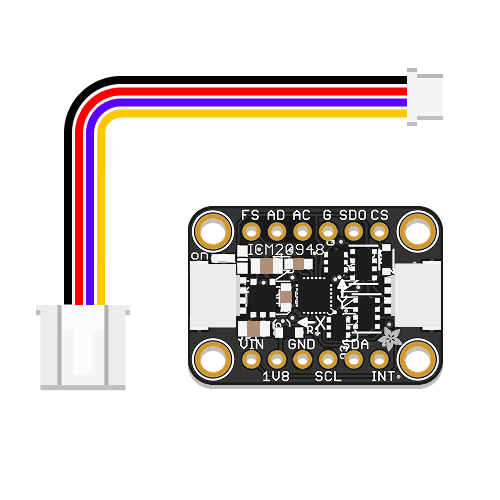
The Adafruit ICM-20948 9-DoF IMU Sensor Board features a 9DoF (9-degree-of-freedom) sensor made by TDK InvenSense. This IMU (inertial measurement unit) integrates:
- A 3-axis accelerometer (linear motion, in m/s²)
- A 3-axis gyroscope (rotation, in rad/s)
- A 3-axis magnetometer (magnetic field, in µT)
The module communicates over I²C.
To connect the Grove IMU breakout, we use a STEMMA QT to Grove cable. These cables can be fragile and sit tightly in their headers. Handle them with care when unseating them.
Preparation
To use the ICM-20948 in CircuitPython, the following libraries are needed:
adafruit_icm20x.mpy(driver for the ICM-20x sensor family, including ICM-20948)adafruit_register(helper library for low-level I²C register access)
Make sure both libraries are present inside the /lib folder on your CIRCUITPY drive. If not, download Adafruit’s Library Bundle for Version 9.x here, extract the needed files, and copy them into /lib.
Basic Usage
This example reads the acceleration, gyroscope, and magnetometer values and prints them to the serial monitor. The code assumes your module is connected to the Grove I²C header on GP7/GP6 (SCL/SDA). Alternatively, you can use the second I²C port on GP9/GP8.
# --- Imports
import time
import board
import busio
import adafruit_icm20x
# --- Variables
i2c = busio.I2C(scl=board.GP7, sda=board.GP6, frequency=400000)
icm = adafruit_icm20x.ICM20948(i2c)
# --- Functions
# --- Setup
# --- Main loop
while True:
ax, ay, az = icm.acceleration
gx, gy, gz = icm.gyro
mx, my, mz = icm.magnetic
print("Acceleration: X:{:.2f}, Y:{:.2f}, Z:{:.2f} m/s^2".format(ax, ay, az))
print("Gyro: X:{:.2f}, Y:{:.2f}, Z:{:.2f} rad/s".format(gx, gy, gz))
print("Magnetometer X:{:.2f}, Y:{:.2f}, Z:{:.2f} uT".format(mx, my, mz))
print()
time.sleep(0.1)
If you want to see the values change visually, replace the print block with
print((ax, ay, az, gx, gy, gz, mx, my, mz))
Then open Mu’s Plotter instead of the Serial Monitor. Each axis will appear as a separate trace.
Additional Resources
Adafruit ICM-20948 Guide
Technical details, wiring diagrams, and advanced usage notes for the sensor.